Peak Locator
Deterministic Peak Detection for Multi-Dimensional Data
N-Dimensional Peak Detection Concepts
Theoretical and practical aspects of peak detection in higher dimensions.
Overview
PeakFinder provides conceptual support for N-dimensional peak detection. While 1D and 2D have efficient algorithms, higher dimensions present unique challenges.
What is an N-D Peak?
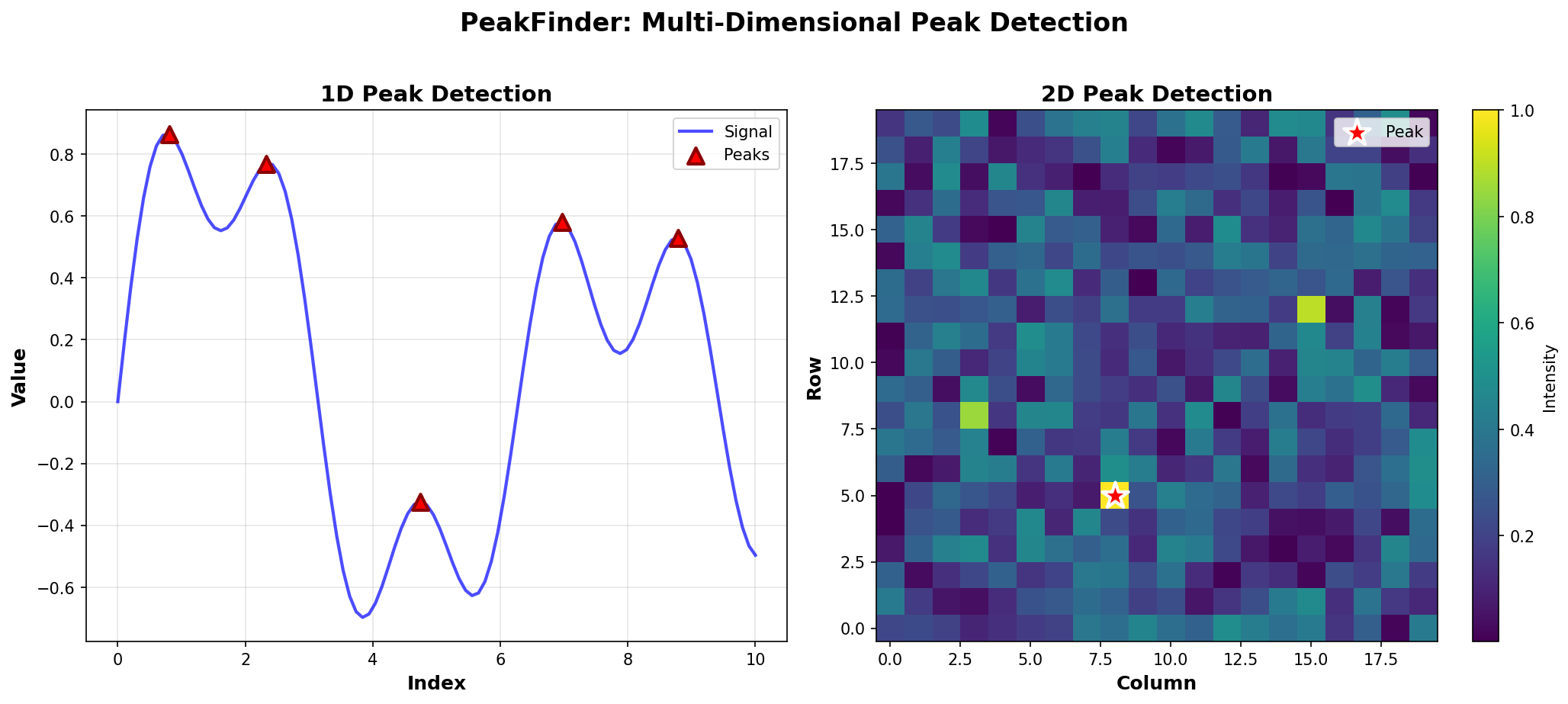
An N-dimensional peak is an element that is greater than or equal to all its neighbors in all dimensions. In 3D, a peak has up to 6 neighbors (up, down, left, right, forward, backward).
Basic Usage
3D Example
from peak_locator import PeakDetector
import numpy as np
# Create a 3D tensor
tensor = np.array([
[[1, 2], [3, 4]],
[[5, 6], [7, 8]]
])
detector = PeakDetector(tensor)
peak = detector.find_peak_nd()
print(f"Peak at {peak}")
# Output: Peak at (1, 1, 1)
4D Example
# 4D tensor
tensor = np.random.rand(5, 5, 5, 5)
detector = PeakDetector(tensor)
peak = detector.find_peak_nd()
print(f"Peak at {peak}")
Algorithm Approach
The N-dimensional implementation uses:
- Greedy Maximum: Finds the maximum element in the tensor
- Neighbor Verification: Checks if it’s a peak by comparing with all neighbors
- Fallback: Returns the maximum index if verification fails
This is a simplified approach. A full divide-and-conquer implementation would be more complex.
Limitations
Current Implementation
- Not Optimal: The current implementation is not as efficient as 1D/2D algorithms
- Greedy Approach: Uses maximum element, which may not always find the optimal peak
- High Memory: For very high dimensions, memory usage can be significant
Theoretical Challenges
- Curse of Dimensionality: As dimensions increase, the number of neighbors grows exponentially
- Algorithm Complexity: Efficient divide-and-conquer becomes more complex
- Practical Use Cases: Most real-world applications use 1D or 2D data
When to Use N-D Peak Detection
Suitable Cases
- Low Dimensions: 3D or 4D tensors
- Small Tensors: When the tensor size is manageable
- Conceptual Work: Understanding peak detection in higher dimensions
Alternatives for High Dimensions
- Flatten and Use 1D: For some use cases, flattening may be appropriate
- Dimensionality Reduction: Reduce dimensions before peak detection
- Specialized Algorithms: Use domain-specific algorithms for your use case
Example: 3D Image Analysis
import numpy as np
from peak_locator import PeakDetector
# 3D image data (e.g., medical imaging)
image_3d = np.random.rand(50, 50, 50) * 255
image_3d[25, 25, 25] = 300 # Add a bright spot
detector = PeakDetector(image_3d)
peak = detector.find_peak_nd()
print(f"Brightest voxel at {peak}")
Performance Considerations
Time Complexity
- Current Implementation: Approximately O(d × n^(d-1) × log(n)) for d dimensions
- Optimal: Could be improved with better algorithms
Space Complexity
- Current: O(1) extra space (excluding input)
- Memory: Input tensor size grows exponentially with dimensions
Best Practices
- Prefer 1D/2D: Use specialized 1D/2D functions when possible
- Limit Dimensions: Keep dimensions reasonable (≤ 4D for practical use)
- Consider Alternatives: Evaluate if N-D peak detection is the right approach
- Test Thoroughly: Verify results for your specific use case
Future Improvements
Potential enhancements for N-D peak detection:
- Efficient Divide-and-Conquer: Implement proper recursive algorithm
- Parallel Processing: Utilize multiple cores for large tensors
- Sparse Support: Handle sparse tensors efficiently
- Domain-Specific Optimizations: Specialized algorithms for common use cases
Next Steps
- Learn about 1D Peak Detection for efficient 1D operations
- Check out 2D Peak Detection for matrix operations
- Explore Quick Start for basic usage